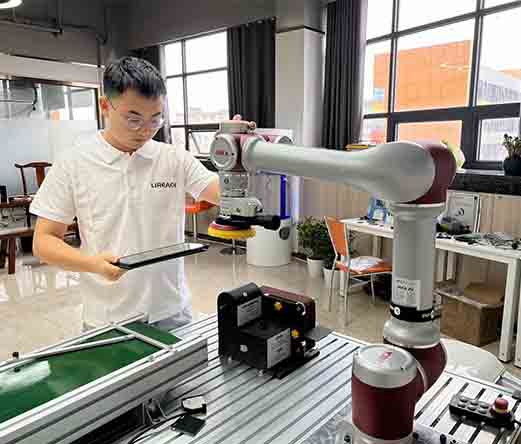
The force sensors enable precise operation of a 6-axis collaborative robot in the following steps:
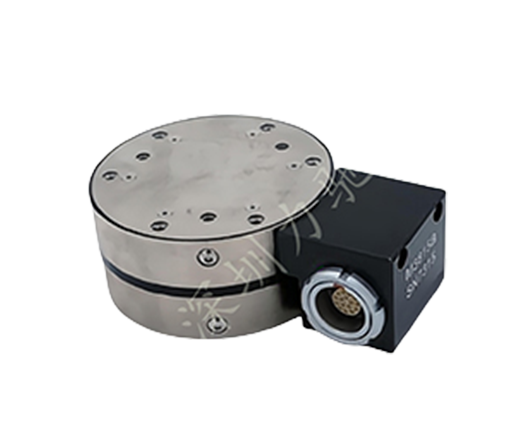
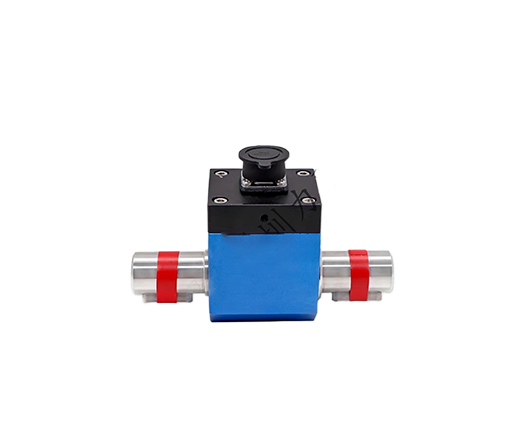
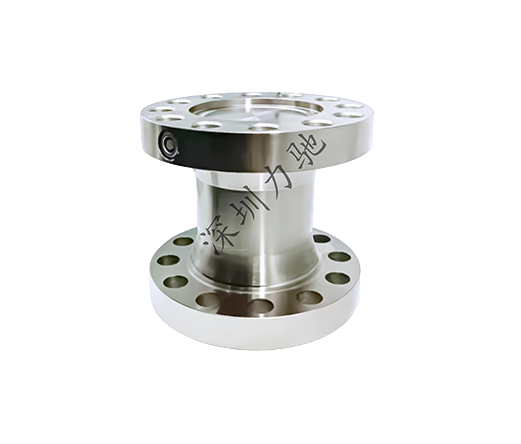
1. Install the force sensor: Install the force sensor on the robot end tool to be able to measure the force and moment exerted by the end tool.
2. Calibrate the force sensors: Before use, the force sensors need to be calibrated to ensure the accuracy of the measurements. The calibration process typically includes a zero calibration and a sensitivity calibration.
3. Monitoring force signals: The force and moment applied by the end tool is measured by the force sensors and the signals are transmitted to the robot control system.
4. force control algorithms: the robot control system uses force control algorithms to achieve precise operation based on the received force signals. The force control algorithm can be designed according to the requirements, such as maintaining a certain force magnitude, following the trajectory for force control, and so on.
5. Feedback control: According to the measurement results of the force sensor and the calculation results of the force control algorithm, the robot control system can adjust the position and torque of the robot joints in real time to realize precise operation.
The key to achieving precise operation through force sensors lies in the accurate measurement and effective utilization of force signals. Therefore, the following points need to be noted when using force sensors:
- Selecting the right force sensor: Select the right force sensor according to the specific application requirements, taking into account factors such as measurement range, accuracy, response time, etc. Calibrate the force sensor: Regularly calibrate the force sensor according to the specific application requirements.
- Calibrate the force sensor: Calibrate the force sensor periodically to ensure the accuracy of the measurement results.
- Design suitable force control algorithms: Design suitable force control algorithms according to specific application requirements to realize accurate operation.
- Combine with vision system: You can combine with vision system to assist force control through visual feedback to improve the precision and stability of operation.
Realizing precise operation through force sensors can make robots safer and more reliable when collaborating with humans, and can also be applied to tasks that require force to be applied to objects, such as assembling, grinding, and cutting.