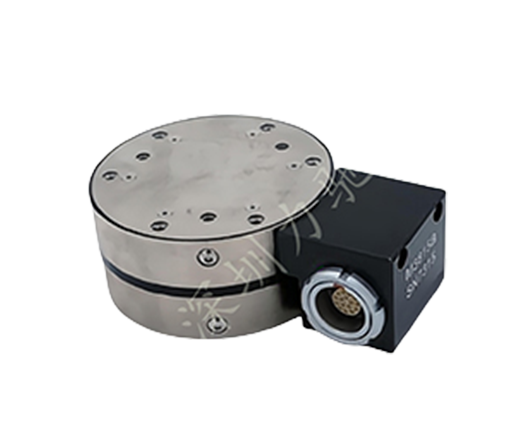
The use of six-axis force sensors to realize the force control of the collaborative robotic arm can be realized through the following steps:1. install...

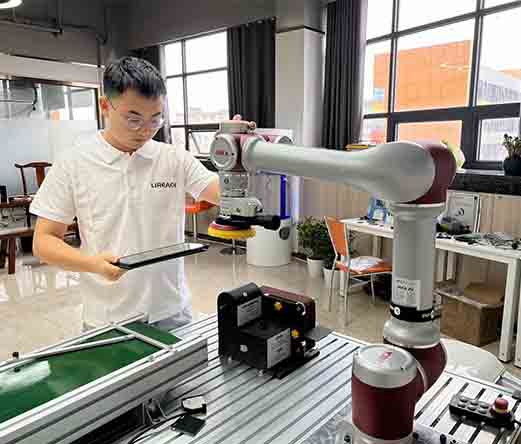
Selection of end-of-arm tools for collaborative robots suitable for their needs need to consider the following factors:1. application needs: first of ...

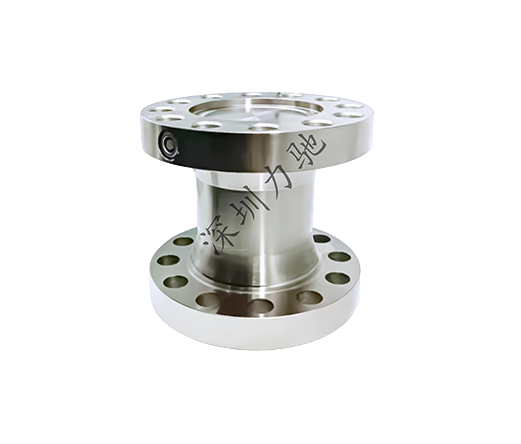
With articulated modules, 6-axis collaborative robots can achieve smooth movements. The following are some of the key roles of joint modules in realiz...