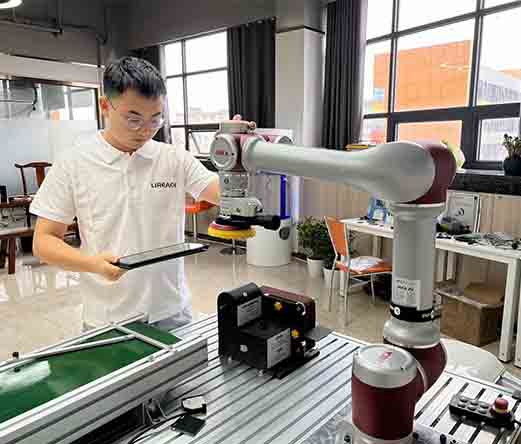
Synchronized collaboration technology for collaborative robotic arms and end-effector is the key to improving industrial productivity and flexibility. This technology enables a high degree of collaborative working between the robotic arm and end-effector, enabling them to accomplish a variety of tasks in complex work scenarios.
The following are some of the key synchronized collaboration technologies:
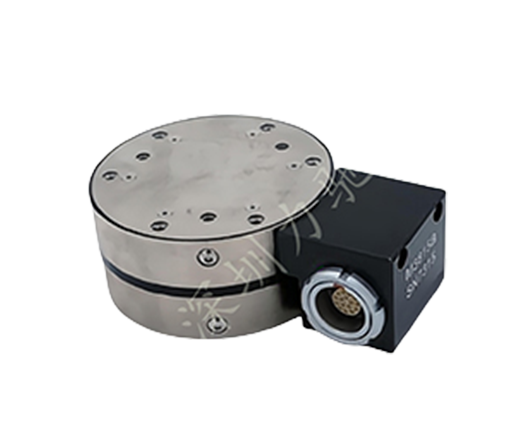
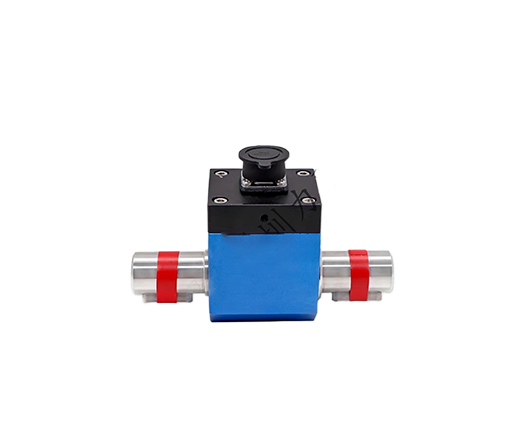
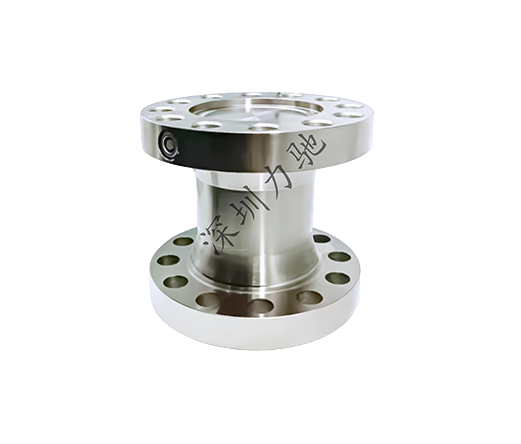
1. Sensor fusion: By fusing data from multiple sensors, such as vision sensors, force sensors, position sensors, etc., precise sensing and control between the robotic arm and end-effector can be realized. For example, by detecting the position and attitude of the target object through the vision sensor, and detecting the amount of force applied through the force sensor, precise positioning and force control of the robotic arm and end-effector can be realized.
2. Motion planning and control: through the optimized motion planning algorithm, the cooperative motion of the robotic arm and the end-effector can be realized. For example, the trajectory planning and interpolation of the robotic arm and end-effector can be realized through the motion planning algorithm to ensure the synchronous motion of the two.
3. Communication and coordination: communication and coordination between the robotic arm and the end-effector is also the key to synchronized collaboration. Through real-time communication and coordination mechanisms, task assignment and collaboration can be realized between the robotic arm and the end-effector. For example, data transmission and command interaction between robotic arms and end-effector can be realized through real-time communication protocols.
4. Safety protection: Safety protection is also very important in the synchronized collaboration process. The robotic arm and end-effector need to monitor the working environment and the position of personnel in real time to ensure safety. For example, collision detection and safe stopping of robotic arms and end-effector can be realized by safety sensors and algorithms.
Efficient, flexible and safe industrial production can be achieved through synchronized and collaborative technology of collaborative robotic arms and end-effector. This technology can be used in a wide range of industrial applications such as assembly, handling, welding, painting, etc. to improve productivity and quality and reduce labor costs and production risks.