To realize an integrated joint module for collaborative robots, the following steps can be considered:
1. Determine the requirements: firstly, you need to define the functions and application scenarios of the collaborative robot, determine the number and type of joints required, as well as the range of motion and load capacity of the joints, and so on.
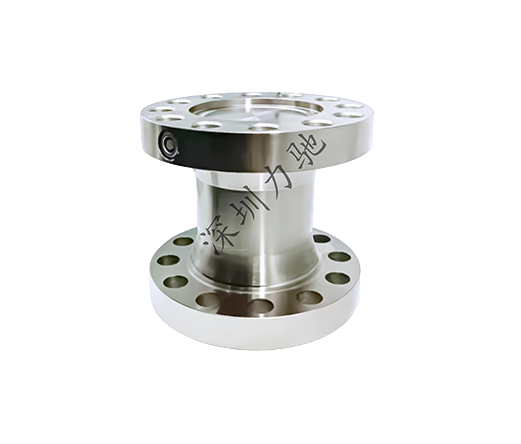
2. Design the joint structure: According to the requirements, design the structure and size of the joints. The joint module usually consists of motors, reducers, sensors and controllers. Factors such as stiffness, precision, reliability and maintainability of the joint need to be considered.
3. Selection of joint actuator: According to the requirements of the joint, select the suitable motor and reducer. The motor can choose stepping motor, DC motor or brushless motor, etc., and the reducer can choose planetary reducer or harmonic reducer, etc.. At the same time, it is also necessary to consider the control mode and interface of the driver.
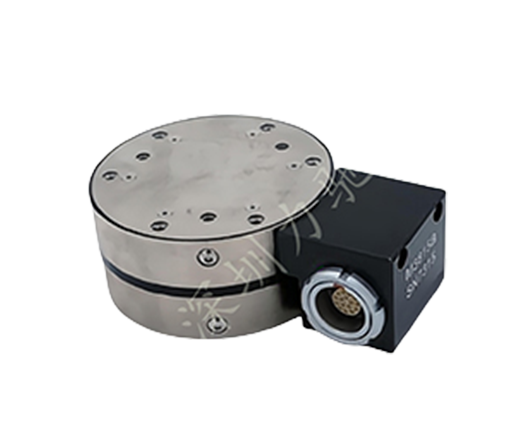
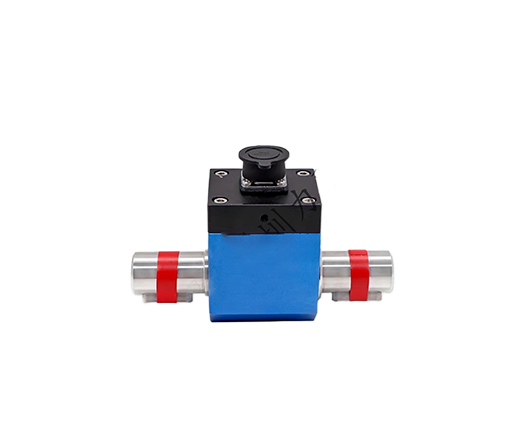
4. Integrated sensors and controllers: Sensors, such as position sensors, force sensors or torque sensors, are integrated in the joint module for real-time monitoring of the status of the joint and feedback information. At the same time, a controller is integrated to control the motion and collaboration of the joints.
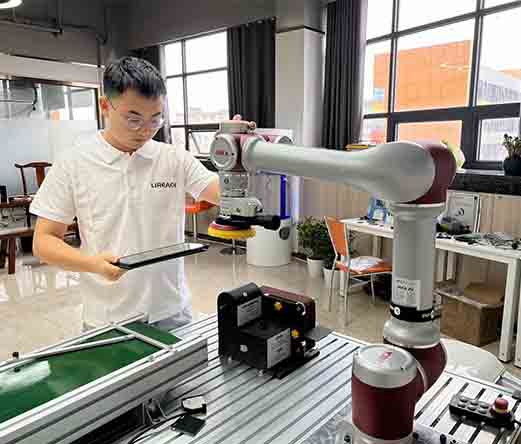
5. System integration and testing: Integrate the joint module with other robot components, such as robotic arms and claws. System testing is performed to verify that the performance and functionality of the joint modules meet the requirements.
6. Optimization and improvement: according to the test results and user feedback, optimize and improve the joint module to improve its performance and reliability.
It should be noted that the design and manufacture of integrated joint modules requires the consideration of knowledge and technology in multiple fields, such as mechanical, electrical, and control. At the same time, it is also necessary to follow the relevant robot safety standards and specifications to ensure the safety and reliability of the joint module.