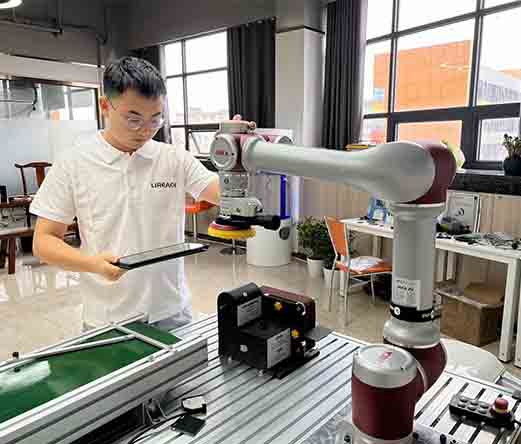
The design and selection of end-of-arm tools for collaborative robots needs to be customized to meet the needs of different industrial sectors. Here are some common ways to meet the needs of different industrial sectors:
1. Gripping tools: Gripping tools are used to grasp, hold, place and manipulate objects. Gripping tools can be designed in a variety of shapes, sizes, and materials depending on the needs of different industrial sectors. For example, in automotive manufacturing, fixtures with multiple adjustable clamping points can be used to accommodate parts of different sizes and shapes.
2. Vacuum chucks: Vacuum chucks can be used to grip flat or curved objects, such as panes of glass, pieces of plastic, etc. Different industries may require different types of vacuum suction cups, for example, the food processing industry may require suction cups that meet sanitary standards.
3. Cutting tools: Cutting tools can be used for operations such as cutting, trimming, and punching during the production process. Depending on the need, different types of cutting tools can be selected, such as knives, laser cutting head and so on.
4. Welding tools: Welding tools are used to carry out welding operations, and different types of welding tools can be selected, such as arc welding, laser welding, and so on. According to the needs of different industrial fields, you can choose the appropriate welding tools.
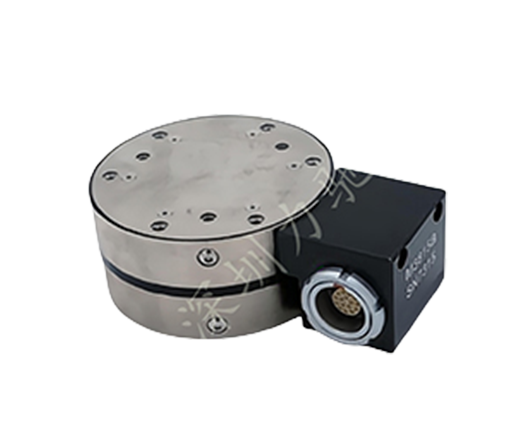
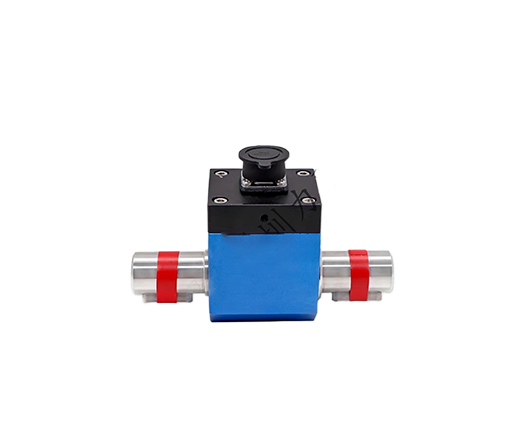
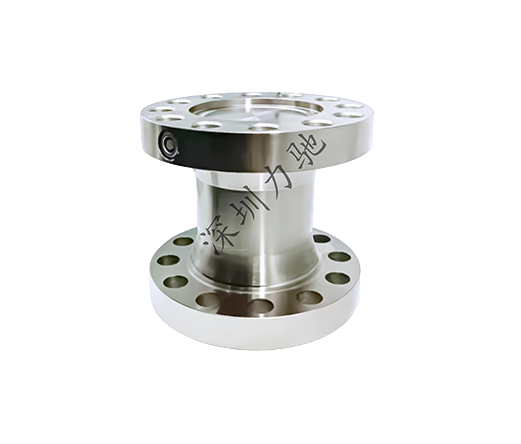
5. Measuring tools: Measuring tools are used to measure the size, position and other parameters of an object. Different types of measuring tools such as sensors, cameras, etc. can be selected according to the needs.
6. Coating tools: Coating tools are used to apply liquid or powder materials, such as spray guns, brushes, etc. Depending on the needs of different industrial sectors, suitable coating tools can be selected.
In addition to the tools listed above, other types of end-of-line tools can be designed and selected according to specific needs. The important thing is to choose the suitable tool to meet the end operation needs of collaborative robots according to the needs and application scenarios of industrial fields.