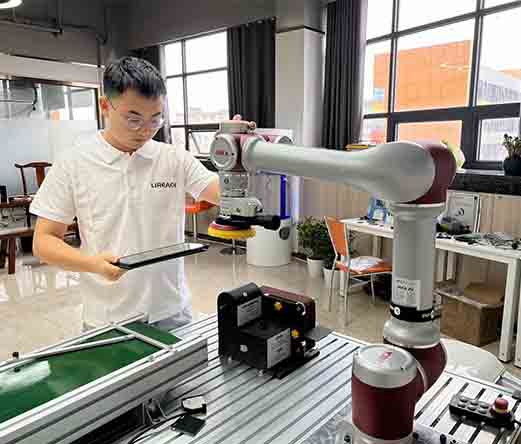
Six-axis force sensors have a promising application in collaborative robotic arms. The following are some application scenarios of six-axis force sensors in collaborative robotic arms:
1. Force control: The six-axis force sensor can measure the force and moment at the end of the robotic arm in real time, thus realizing force control. Through the feedback of the sensor measurement value, the robotic arm can adjust its own movement according to the change of the external force, the realized force control operation. This application is widely used in assembly, gripping, insertion and other tasks that require force control.
2. Force limitation: Six-axis force sensors can be used to set force limits to ensure that the robotic arm does not exert too much force during operation. This is especially important for collaborative robotic arms that work with humans to protect personnel.
3. Force/Moment Detection: Six-axis force sensors can be used to detect forces and moments in an object to enable tactile sensing of the object. This is useful for the robotic arm to recognize the properties, shape and surface features of an object during operation.
4. Force Feedback: Six-axis force sensors can provide force feedback information, allowing the robotic arm to sense the forces interacting with the environment. This is useful for the robotic arm to be able to better adapt to changes in force when physically interacting with a person or other object, enabling more natural and safe cooperation.
5. Force Transmission: Six-axis force sensors can be used to enable force transmission, allowing a robotic arm to sense external forces through force sensors and transmit them to other devices or tools. This is very useful for collaborative robotic arms to work with other devices or tools for force co-operation.
In conclusion, the application of six-axis force sensors in collaborative robotic arms is very promising. Through real-time measurement and feedback of force information, the robotic arm can realize force control, force limitation, force/torque detection, force feedback and force transfer, thus improving the operation accuracy, safety and adaptability of the robotic arm.