The use of six-axis force sensors to realize the force control of the collaborative robotic arm can be realized through the following steps:
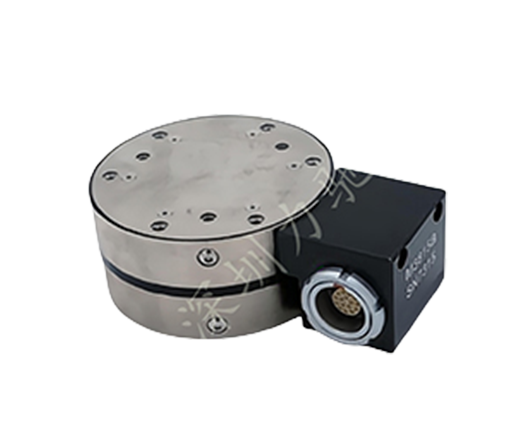
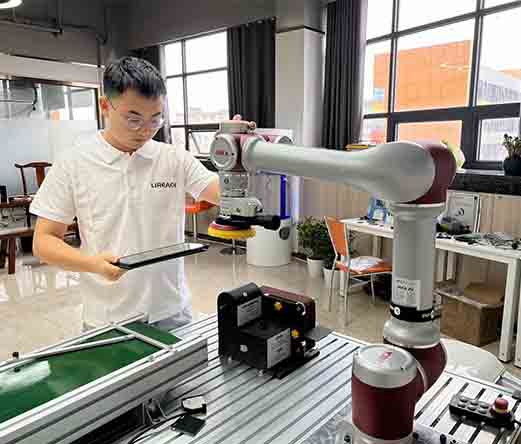
1. installing the six-axis force sensor: first of all, it is necessary to install the six-axis force sensor at the end of the collaborative robotic arm, which is used to sense the external forces and moments.
2. Collecting sensor data: Through programming, the data collected by the six-axis force sensor is transmitted to the controller of the robotic arm for real-time monitoring of external forces and moments.
3. design force control algorithm: according to the application requirements, design the corresponding force control algorithm. For example, the force control algorithm based on PID control can be designed to adjust the trajectory and strength of the robotic arm in real time according to the data collected by the sensor, so that it can operate according to the preset strength and direction.
4. Realize force control: Embed the designed force control algorithm into the controller of the robotic arm to realize force control. In actual operation, the robotic arm will be adjusted in real time according to the data collected by the sensor to ensure the accuracy and safety of the operation.
In conclusion, the use of six-axis force sensors to realize the force control of a collaborative robotic arm requires multiple steps such as installing sensors, collecting data, designing force control algorithms and realizing force control. Through these steps, the force control of the robotic arm can be realized to improve the operation precision and safety of the collaborative robotic arm.